Contact : frederic.boulanger@centralesupelec.fr
Frédéric Boulanger, CentraleSupélec/LRI
Consultez les projets des années passées pour vous faire une idée des projets que je propose.
Candidature sur lafabrique.centralesupelec.fr/pole
Contrôle d'un instrument de musique (deux groupes max.)
Effectif
Ce projet convient à une équipe de 3 élèves.
Objectif
Il s'agit de contrôler un instrument de musique à partir d'un ordinateur, sans faire aucune modification définitive sur l'instrument. Ce projet comporte une partie mécanique pour s'interfacer avec l'instrument, une partie électronique/micro-contrôleur pour piloter la mécanique, et une partie logicielle, par exemple pour lire des fichiers MIDI et les jouer sur l'instrument. Le choix de l'instrument est libre.
Étapes
- Choix de l'instrument (et donc choix des difficultés à traiter)
- Conception et réalisation des actionneurs
- Programmation des actionneurs à l'aide d'un micro-contrôleur (+ un peu d'électronique)
- Réalisation d'un programme permettant de faire jouer des notes à l'instrument robotisé.
Détails techniques
Le micro-contrôleur peut être un Arduino ou une Pyboard (programmation en Python avec MicroPython)

Exemple réalisé sur une flûte à bec
Robot explorateur (un seul groupe)
Effectif
Ce projet convient à une équipe de 3 élèves.
Objectif
On souhaite exploiter une plateforme mobile (2 roues motorisées et une roulette folle) pour explorer un espace plan.
Étapes
- Compléter la plateforme avec des capteurs pour éviter les obstacles et les chutes dans les escaliers
- Piloter les deux moteurs et utiliser les roues codeuses pour maîtriser la trajectoire du robot
- Mettre au point l'algorithme de navigation/exploration, ajouter éventuellement les capteurs permettant d'obtenir les informations nécessaires (télémètre, webcam etc.)
- Réaliser un programme permettant de contrôler le robot et de récupérer les informations qu'il récolte (carte des lieux, variations de température, de luminosité etc.)
Détails techniques
On s'orientera a priori vers une plateforme ESP32 afin de bénéficier d'un connexion radio (WiFi ou Bluetooth) avec le robot. Il y a également une partie programmation classique pour développer le "centre de contrôle" permettant de suivre et de paramétrer le robot.
L'ESP32 peut être utilisée avec MicroPython, ce qui facilite le prototypage.
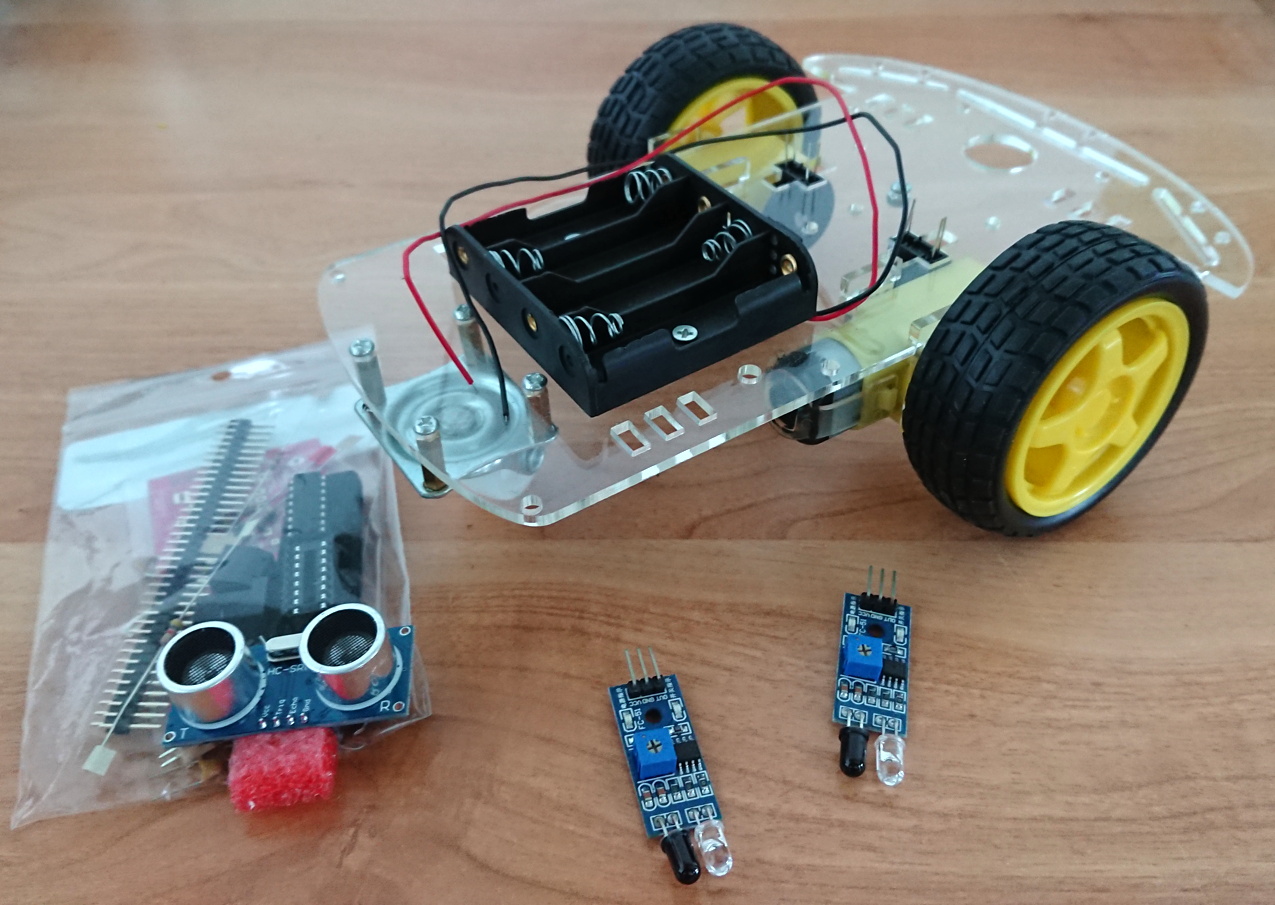
Voici la plateforme que je vous propose pour le robot :